Building a Heading Sensor Resistant To Magnetic Disturbances
Uncategorized
1
Posts
1
Posters
1
Views
-
Building a Heading Sensor Resistant To Magnetic Disturbances
Light aircraft often use a heading indicator as a way to know where they’re going. Retired instrumentation engineer [Don Welch] recreated a heading indicator of his own, using cheap off-the-shelf hardware to get the job done.
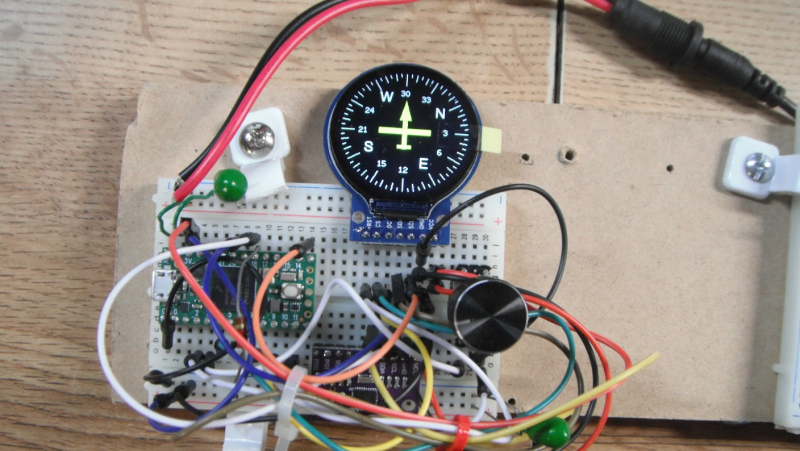
The heart of the build is a Teensy 4.0 microcontroller. It’s paired with a BNO085 inertial measurement unit (IMU), which combines a 3-axis gyro, 3-axis accelerometer, and 3-axis magnetometer into a single package. [Don] wanted to build a heading indicator that was immune to magnetic disturbances, so ignored the magnetometer readings entirely, using the rest of the IMU data instead.
Upon startup, the Teensy 4.0 initializes a small round TFT display, and draws the usual compass rose with North at the top of the display. Any motion after this will update the heading display accordingly, with [Don] noting the IMU has a fast update rate of 200 Hz for excellent motion tracking. The device does not self-calibrate to magnetic North; instead, an encoder can be used to calibrate the device to match a magnetic compass you have on hand. Or, you can just ensure it’s already facing North when you turn it on.
Thanks to the power of the Teensy 4.0 and the rapid updates of the BNO085, the display updates are nicely smooth and responsive. However, [Don] notes that it’s probably not quite an aircraft-spec build. We’ve featured some interesting investigations of just how much you can expect out of MEMS-based sensors like these before, too.
youtube.com/embed/UoS7PKGJVlE?…
Gli ultimi otto messaggi ricevuti dalla Federazione
-
Chi ha colpito la scuola di Minab in Iran? Il pesante indizio nelle mappe dell’operazione “Epic Fury” svelato in una conferenza stampa USA.
Il Pentagono pubblica le mappe dei target di "Epic Fury" e spunta il cluster su Minab. Il giallo delle coordinate e dei database datati
https://www.open.online/2026/03/06/bombardamento-scuola-minab-pesante-indizio-mappe-usa-fact-check/
-
Inquietante e significativa (ma purtroppo non sorprendente) l'esperienza personale che introduce il resto della recensione di @stspataro
https://poliverso.org/display/0477a01e-1469-aaea-338e-38c273013941
-
-
Checkmate adulthood!
-
@pfefferle @evan @darius “We've heard your criticisms about JSON-LD loud and clear, so today the Working Group is proud to announce...” 😇
-
@NemoJmeno Ouiii,n'hésite pas à user de ce hashtag quand tu fais ce genre de post, ça le fait une belle surprise sur mon fil 😁🥰
-
@laurenshof @cwebber @evan what I really like is the openness of it all.
On the signing issue, I'm with Christine. I like Evan's viewpoint for social systems, but not for digital systems with "complex system" mechanics and active intelligent threat actors.
-
This post did not contain any content.